

Pour télécharger cet article en version PDF cliquer ici ==>
Dans le tutoriel précédent, nous avons vu comment prétraiter des images et nous disposions donc, à l’issue de ces opérations, d’un lot d’images de luminance et d’un lot d’images dans chacun des filtres couleur rouge, vert et bleu prêtes à être utilisées pour créer, d’une part, une image en luminance de notre objet et d’autre part, une image couleur (RVB) de celui-ci.
Nous allons maintenant effectuer les opérations suivantes :
1- Analyse et sélection des images.
2- Alignement des images.
3- Addition des images.
Si vous le souhaitez, vous pouvez télécharger les process que nous allons utiliser dans cet article en cliquant ici … Vous obtenez ainsi la liste des process suivante :
Pour commencer, nous allons analyser nos images et en « mesurer » la qualité. En cliquant sur Analyser les images on lance le process SubframeSelector : celui-ci se compose de 3 fenêtres qui s’affichent alors, SubframeSelector, SubframeSelector Measurements et SubframeSelector Expressions. 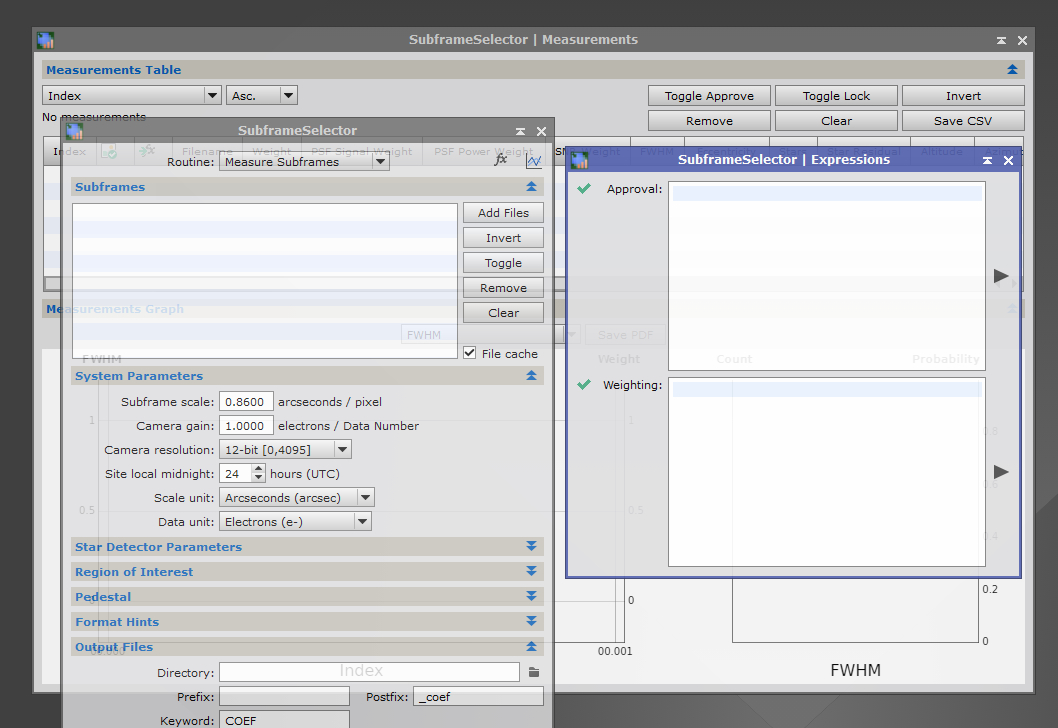
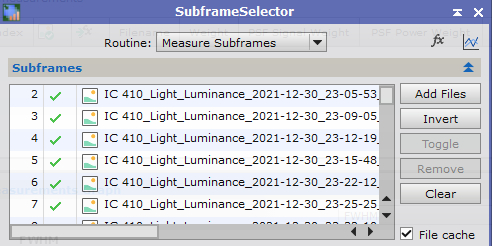
Nous allons tout d’abord entrer toutes nos images de luminance en cliquant sur Add Files dans la fenêtre SubframeSelector, ici j’ai 73 images en luminance de la nébuleuse IC 410.
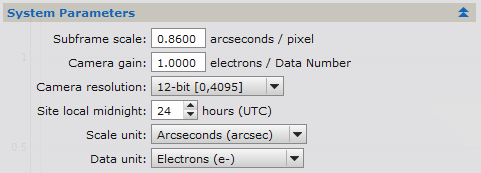
Dans la partie System Parameters il faut normalement régler certains paramètres afin que les mesures effectuées par le process soient le plus fiables possibles. Ici le process est réglé en fonction de mon setup, les réglages sont à adapter au vôtre :
– dans Subframe Scale on entre l’échantillonnage de la caméra utilisée, ici 0,85 arcseconde/pixel dans mon cas. L’échantillonnage E se calcule à l’aide de la formule E = 206 x P/F, formule dans laquelle P représente la taille des pixels de la caméra en microns et F la focale de l’instrument utilisé en mm. Pour l’ASI 1600 la taille des pixels est P=3,80 et j’ai F=920 (la focale du télescope est de 800 mais l’utilisation du Paracorr multiplie la focale par 1,15 ce qui donne une focale résultante de 920). J’ai donc bien E = 206 x 3,8 / 920 = 0,85. La valeur est donc à modifier pour être adaptée à votre setup. Il est à noter que cette valeur ne sera utilisée dans les calculs du process que si l’unité choisie dans Scale Unit est Arcseconds.
– Dans Caméra gain se trouve la valeur 1. En effet, quand je fais mes acquisitions, je règle le gain de la caméra sur 139, valeur qui correspond justement à un gain de 1 électron par ADU , c’est la « fameuse » valeur nommée Unity Gain dans les paramètres constructeurs de la caméra. Bref, en réglant le gain de la caméra sur cette valeur lors des acquisitions, ceci permet donc de régler ce paramètre sur 1 dans le process. Là aussi, cette valeur ne sera utilisée que si on choisit Electrons dans Data Unit.
– Dans Caméra résolution j’ai sélectionné 12 bits, qui correspond à la résolution de l’ASI 1600.
– Dans Scale Unit j’ai choisi Arcseconds comme unité afin que le process puisse utiliser mon échantillonnage dans ses calculs.
– Dans Data Unit j’ai choisi Electrons pour que le process utilise la valeur indiquée dans Caméra gain.
On clique maintenant sur le disque bleu afin de lancer le process. Si comme moi vous avez plusieurs dizaines d’images, cela peut prendre un certain temps !
Les résultats de l’analyse des images s’affiche maintenant dans la fenêtre SubframeSelector Measurements :
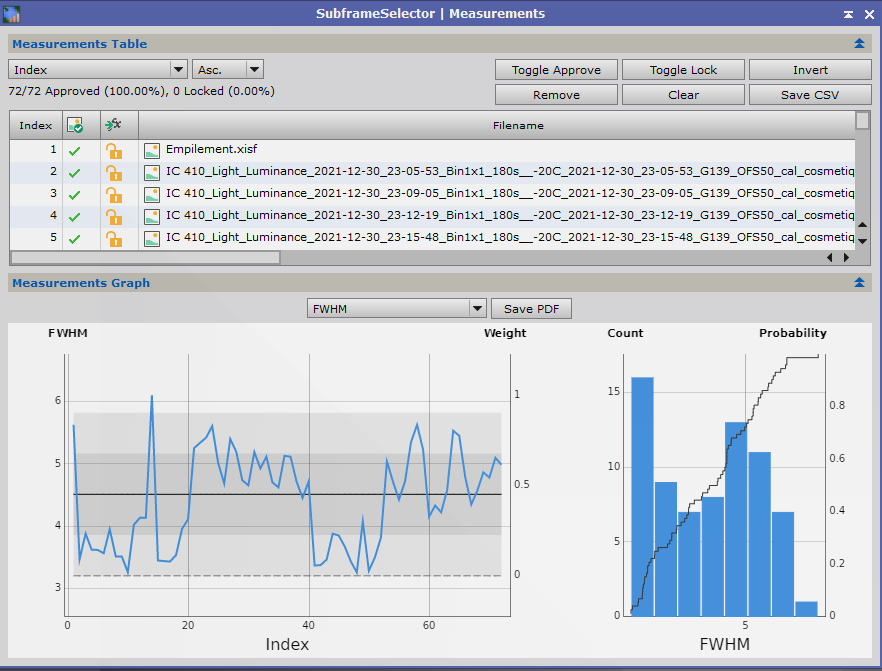
La première chose que l’on va faire, c’est sélectionner une image qui va servir de référence pour l’alignement de toutes les autres. Pour cela, on va chercher l’image ayant la meilleure FWHM, c’est-à-dire celle qui a la plus petite FWHM. Dans le premier menu déroulant, tout en haut à gauche, on va donc choisir FWHM puis Asc. dans le second, afin de classer toute les images par ordre Ascendant en fonction de leur FWHM, donc de la plus petite à la plus grande valeur. L’image possédant la meilleure FWHM est donc la première de la liste.
On note son nom et on peut cliquer directement dessus dans la liste, afin de l’ouvrir. En cliquant sur Visualisation des images linéaires, on peut afficher son contenu afin de vérifier qu’elle ne contient pas de traces parasites, comme un passage de satellite par exemple …
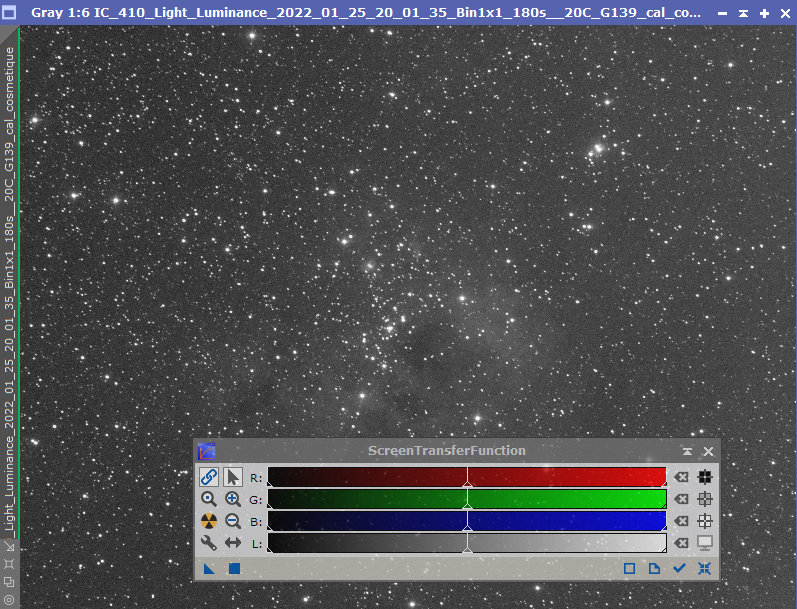
Notre image semble tout à fait correcte, il nous faut maintenant en sélectionner une autre qui va cette fois servir de référence pour l’addition des images.
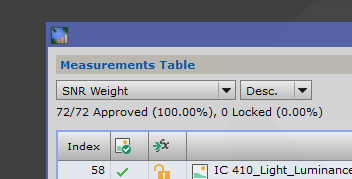
Une première façon simple de procéder consiste à simplement choisir l’image qui a le meilleur rapport signal sur bruit, il suffit pour cela de sélectionner SNR Weight dans le menu déroulant puis Desc. afin de classer les images par ordre descendant. On obtient ainsi cette fois en tête de liste l’image ayant le meilleur signal sur bruit.
On peut également la visualiser pour vérifier qu’elle ne contient pas de traces gênantes, puis on peut retenir son nom comme référence pour l’empilement des images. On peut très bien se contenter de cette méthode et dans ce cas-là, vous pouvez passer directement à l’étape 2, l’alignement des images.
Cependant une seconde façon de faire consiste à opérer une sélection et un tri un peu plus poussé des images à l’aide de notre process, c’est plutôt cette méthode que je privilégie généralement. On va pour cela utiliser la fenêtre SubsframeSelector Expressions.
Dans la seconde partie de cette fenêtre, nous allons entrer une formule qui va servir à attribuer un « poids » à chaque image, poids qui sera d’autant plus élevé que les critères de l’image seront de bonne qualité. J’ai intégralement repris la méthode du site Light Vortex Astronomy, décrite ici si vous lisez l’anglais : https://www.lightvortexastronomy.com/tutorial-pre-processing-calibrating-and-stacking-images-in-pixinsight.html#Section5.
Voici la formule à copier et à coller dans la case Weighting de la fenêtre :
(15*(1-(FWHM-FWHMMin)/(FWHMMax-FWHMMin)) + 15*(1-(Eccentricity-EccentricityMin)/(EccentricityMax-EccentricityMin)) + 20*(SNRWeight-SNRWeightMin)/(SNRWeightMax-SNRWeightMin))+50
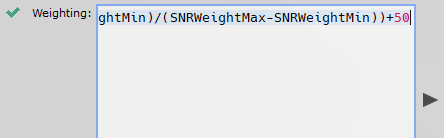
Sans entrer dans les détails, cette formule va attribuer un poids (Weight) à chaque image, qui sera en fait une valeur en 50 et 100 (la valeur 50 ayant été choisi arbitrairement dans cette formule). Ce qu’il faut retenir, c’est que plus la valeur de Weight sera élevée, meilleure sera la qualité de l’image. La formule en question calcule une valeur basée sur la FWHM, le SNR Weight (critère qui prend en compte le rapport signal sur bruit) et l’Eccentricity (critère qui mesure la rondeur des étoiles). Cliquez maintenant sur le petit triangle noir à côté de la case ![]() .
.
Après cela, le critère Weight est rempli par une valeur et si on l’affiche dans l’ordre descendant, la première image de la liste est logiquement la meilleure image du lot.
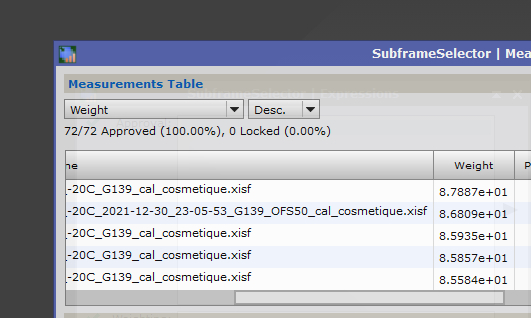
Il faut cependant veiller à l’ouvrir pour vérifier qu’elle ne contient pas de traces parasites. Si tout va bien, on peut noter le nom de cette image qui servira de référence pour l’empilement de toutes les images du lot.
Maintenant on retourne dans la fenêtre Subframe Selector et dans le menu déroulant Routine, on va remplacer Measure Subframes par Output Subframes, pour sauvegarder nos images et leur valeur Weight respectives.
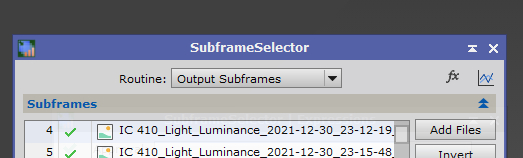
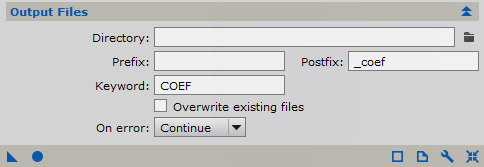
Dans la partie Output Files, on peut choisir dans Directory un dossier dans lequel seront sauvegardées ces images (sinon elles resteront dans le même dossier que les autres), dans Postfix on peut choisir un suffixe pour identifier nos images (j’ai choisi _coef) et surtout, très important, il faut entrer dans Keyword un mot-clef (j’ai choisit COEF, le mot-clef par défaut est SSWEIGHT, vous pouvez bien entendu en écrire un autre). Ce mot-clef pourra être utilisé dans l’addition des images pour obtenir un empilement optimisé.
Il ne reste plus qu’à cliquer sur le disque bleu pour sauvegarder nos images optimisées.
Pour finaliser cette étape, je procède généralement à une ultime vérification en utilisant le critère Eccentricity. 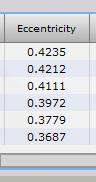
En effet, pour des valeurs d’Eccentricity tournant autour de 0,40 les étoiles sont considérées comme parfaitement rondes. Quand on se rapproche de 0,60 (et évidemment au-delà) les étoiles sont généralement beaucoup moins rondes. Je prends alors le temps d’ouvrir toutes les images dont l’Eccentricity se trouve au-delà de 0,55 pour voir à quoi y ressemblent les étoiles et, si certaines montrent des étoiles que je ne juge pas suffisamment rondes, je les supprime sans hésiter.
Pour en finir avec ces opérations, je reprends les deux images dont j’ai noté le nom comme référence pour l’alignement et l’addition des images, et je les renomme respectivement Alignement et Empilement afin de pouvoir les retrouver aisément par la suite. Voilà, nous en avons fini avec nos images de luminance… Oui, vous avez compris, il faut refaire la même chose avec nos poses de Rouge, Vert et Bleu. Il est cependant inutile de sélectionner une image pour l’alignement, car nous utiliserons l’image sélectionnée en luminance pour aligner les poses couleur. Il faut cependant sélectionner une image d’empilement pour chacune des couches R, V et B en utilisant soit la méthode simple, soit la méthode optimisée décrite précédemment.
Allez, une fois ceci terminé, on peut passer aux deux étapes suivantes !